




Для поддержания с помощью преобразователя частоты того или иного заданного параметра используется ПИД регулятор. Как настроить ПИД регулятор в преобразователе частоты Danfoss рассмотрим на примере.
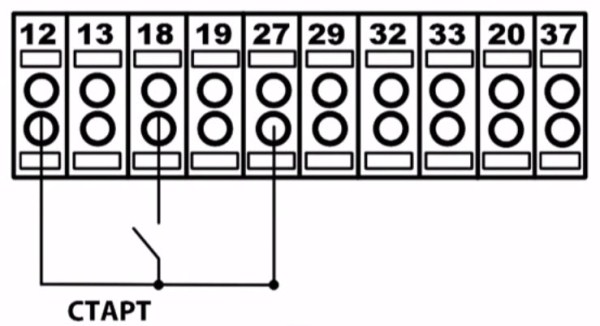
В качестве примера рассматривается вентиляторная установка с датчиком давления воздуха. Задача: удерживать необходимое давление воздуха. Произведем подключение управляющих сигналов следующим образом:
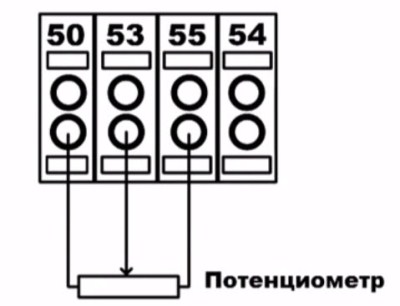
Сигналом задания будет служить потенциометр. Потенциометр подключим следующим образом:
Сигналом обратной связи будет являться датчик давления. Подключим датчик давления по следующей схеме:
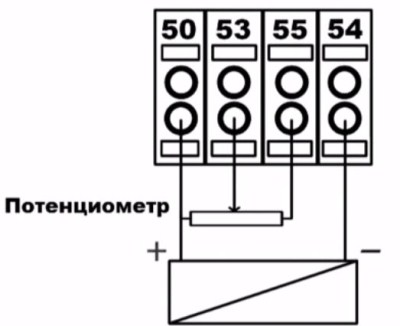
При подключении датчика давления необходимо соблюдать полярность. При использовании токового датчика давления необходимо указать, что 54-ый аналоговый вход работает в токовом режиме. Для этого необходимо перевести переключатель А54, расположенный под графической панелью в крайнее правое положение. Настройку ПИД регулятора произведем при помощи программы MCT-10. Программное обеспечение MCT-10 для работы с преобразователями частоты позволяет производить контроль параметров преобразователя в графическом виде. Посредством USB кабеля подключаемся к преобразователю частоты.
Перед подключением преобразователя частоты к компьютеру по USB ознакомьтесь с инструкцией к MCT-10. Установив программное обеспечение на компьютер запускаем его. Программа автоматически должна определить преобразователь частоты. Через нисподающее древовидное меню доступны для редактирования все возможные параметры преобразователя частоты. Для предварительных настроек преобразователя частоты Danfoss необходимо ввести номинальные данные двигателя, которые указаны в паспорте в группу параметров 1-2. 1-22 - номинальное напряжение двигателя, 1-23 - номинальная частота, 1-24 - номинальный ток двигателя, 1-25 - номинальная скорость двигателя.
Далее произведем параметрирование аналоговых входов преобразователя частоты в группе параметров 6. В группе 6-1 зададим параметры для сигнала задания. 6-10 присвоим значение 0 вольт. 6-11 присвоим значение 10 вольт. 6-14 установим также 0. Это значение в инженерных единицах. 6-15 установим значение 25, оно также в инженерных единицах. Таким образом крайнее левое положение потенциометра будет соответствовать 0 бар, а крайнее правое 25 барам. В группе 6-2 зададим параметры датчика. 6-22 и 6-23 - это электрические параметры датчика в миллиамперах. 6-24 и 6-25 - это параметры датчика в инженерных единицах, в нашем случае в барах. 6-22 установим равное 4. 6-23 установим 20. 6-24 значение 0 и 6-25 значение 25. Настроим преобразователь таким образом, чтобы он работал в контуре регулирования процесса. Параметр 1-00 установим в значение "closed loop". Это будет значить, что преобразователь работает в замкнутом контуре. В парметре 3-15 укажем, что задание мы производим от аналогового входа 53. 3-02 и 3-03 параметры указывают диапазон, в котором работает контур. Это минимальное и максимальное значение регулируемой величины, также указывается в инженерных единицах. Параметрам 3-41 и 3-42 присвоим значение 2. Эти два параметра подходят не для всех применений. Их значение выбирается в каждом конкретном случае.
Создадим осцилограф - выбрав в диалоговом меню меню проекта соответствующий пункт. Выберем вкладку новый осцилограф. Появится диалоговое меню, в котором можно выбрать параметры преобразователя частоты необходимые для наблюдения. Укажем преобразователь частоты и в нижнем меню из списка доступных параметров, выберем канал, который необходим для наблюдения. Для настройки ПИД регулятора нам потребуется 2 канала. Это каналы задания в единицах - refernce unit и обратная связь в единицах - feedback unit. Выбираем канал задания и жмем кнопку "далее". Появится диалоговое меню с параметрами канала. В настройках канала необходимо указать масштаб для осцилографа. Это масштаб для оси Y, ось X - временная. Выбираем 5 единиц на клетку и жмем ОК.
Настройка ПИД регулятора в преобразователях частоты Danfoss заключается в определению коэффициентов пропорциональной и интегральной составляющих регулятора. Для определения пропорциональной составляющей проделаем следующее действие: уберем влияние интегральной составляющей и параметру 20-94 присвоим максимальное его значение, а параметру 20-93, который отвечает за пропорциональную составляющую укажем значение 1.
Для наблюдения за состоянием регулируемой величины будем использовать осцилограф. Для запуска осцилографа в режиме считывания данных нужно нажать кнопку в панели меня программы MCT10. Запустим преобразователь частоты и зададим некоторое задание. Для определения пропорциональной составляющей будем увеличивать ее значение до того момента, пока не появятся автоколебания регулируемой величины. Автоколебания различимы, достаточно хорошо видны на осцилографе и имеют устойчивый характер. Вернем значение пропорциональной составляющей в предыдущее значение, при котором автоколебаний не было. Убедимся в отсутствии автоколебаний. При использовании только пропорциональной составляющей всегда будет возникать, так называемая, статическая ошибка регулирования. Это разница между заданием и реальным значением регулируемой величины. Для устранения статической ошибки необходимо добавить влияние интегральной составляющей. Выставим параметр 20.94 значение 5. И продолжим наблюдать за состоянием регулируемой величины. В процессе наблюдения видим, что статическая ошибка уменьшается. В определенный момент автоколебания начинают возникать вновь - это чрезмерное влияние пропорциональной составляющей. Уменьшим пропорциональную составляющую и вернемся к наблюдению. Если остается статическая ошибка регулирования, то необходимо вновь уменьшить интегральную составляющую. Параметр 20-94 будем уменьшать до такого значения, пока разница не уменьшится и не исчезнут колебания. Как только значение сравняется с заданием и перестанет колебаться процесс настройки можно считать завершенным.
Для проверки, можно посмотреть как ведет себя система при изменении задания. При изменении задания присутствует некое перерегулирование, что характерно для всех ПИД регуляторов.
Источник:
